< 토크의 측정 방법 및 역학 관계 >
회전력이라고도 표현할 수 있는데, 물체를 동작시키려 할 때에 필요로 하는 힘을 표현한 것이다. 토크의 크기는 N-cm, N-m, in-lbf (단위: 힘*거리) 등의 일반적인 토크 단위로 표현될 수 있습니다.
토크 측정에 대한 기술은 종래부터 현재.미래에 이르기 까지 다양하게 발전되고 있으며 방법으로는 여러가지가 있으며 몇가지를 소개하고자 합니다.
토크센서의 측정을 인터페이스 . 디지털측정미터 및 컴퓨터 프로그램을 통한 다양한 미터값으로 표시함은 물론 사용자가 원하는토크 제어를 설정할 수 도 있다. 토크관련 기본적인 용어설명과 손쉬운 이해를 위하여 참조 하세요.
![]()
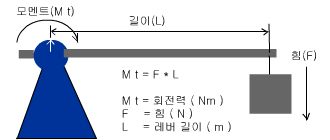
기본 토크의 측정은 역학적인 기본관계를 이용하여 상기 우측과 같이 수동식으로 설정하여 할 수 있으나 이는 측정시스템 자체 공명이 낮은 주파수를 가지므로 이 또한 동적측정( 회전식, 다이나모등)에 있어서는 1도까지의 큰 비틀림으로 인하여 적합치 않다. 현재는 스트레인 게이지나 마그네틱바를 이용하여 전자.기계식으로 측정하는 방식을 채택하고 있다.
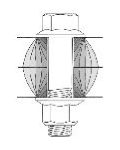
스트레인 게이지를 이용한 토크센서는 0.01에서 100,000Nm의 측정범위 및 0.05%까지의 정확도를 가질 수 있으며 일반적으로 내부회로는 full bridge가 이용된다. 즉 4개의 스트레인게이지가 장착된다. 이때 굽힘력과 횡력이 함께 측정 되지 않기 때문에 최소한이 되도록 토크센서를 장착한다. 이러한 힘의 분산과 발란스가 될 수 있도록 적합한 커플링 을 선택하며 기계적으로 작동 과부하를 차단. 센서보호를 위하여 토크 리미터를 사용토록 권장된다.
토크수동센서( Passive sensor )의 출력신호는 보통 mV/V로 표시되며 범위는 0.5 , 0.8, 1.0, 1.5, 2.0 및 2.2 mV/V로 나누어지며 입력전원은 5V 또는 10V가 인가되며 이에 따라 센서별로 2.5 ....22mV가 출력신호로 이용된다. ....... 정현 토크센서와 접촉식 회전센서의 경우가 해당된다. 이러한 신호는 미약하여 노이즈나 외부환경에 따른 신호의 왜곡이 일어날 수도 있기 때문에 연결케이블에 강화기를 연결사용할 수 있다. 또한 제조사에 따라 센서하우징에 직접 전압 강화기를 내장하여 +-5V, +-10V 또는 12+- 8mA의 출력신호를 내보내기도 한다.
능동센서 ( Active sensor)는 센서에 강화기가 직접내장되어 +-5V/10V등의 출력신호가 나오기 때문에 사용자가 직접 신호를 처리함에 있어 AD-Board나 SPS에 연결하여 사용하기 용이하고 편리함에 있다. 이러한 경우는 전원은 12V나 24V가 공급된다. 회전식 비접촉식센서의 경우이며 SAW-Technology의 다양한 적용 및 Magnetic 을 이용한 EMD-Technology 의 적용이 있다.




모터의 토크는 회전체를 돌리기 위한 회전력으로서, 1kg-cm의 토크라는 것은 회전체의 반경이 1cm인 외주의 한 점에서 직각 방향으로 1kg의 힘을 가한 경우의 회전력을 나타낸다.
토크 T(kg-cm)와 출력 P(KW)와의 관계와 회전수 N(rpm)과의 관계는 다음과 같다.
T = 974 P/N (kg-m)
P : 정격출력(kW) / N : 회전수(rpm)
이러한 수식을 이용하여 모터의 토크.속도.출력을 측정. 표시. 소프트웨어로 처리할 수 있는 시스템이 이용된다.
① 시동 토크(Starting Torque) : 모터가 기동할 때 발생되는 회전력으로 회전자 구속회전력 (Locked Rotor Torque)이라고도 하고, 기동 토크라고도 한다.
② 정격 토크 (Rated Torque) : 전동기의 정격 속도 시의 토크로 이때 모터에는 정격 전압을 가해 정격 출력을 연속적으로 낼 때의 토크라고 하며, 정상 운전시에는 이 토크 이하에서 사용하며 전부하 토크라고도 한다.
③ 최대 토크 (정동 Torque) : 전동기가 낼 수 있는 회전력의 최대치로서 정동 회전력이라고도 하며, 운전중에 최대 토크 이상의 부하가 걸리면 전동기는 정지된다.
④ 정마찰 토오크 : 전자(電磁) 브레이크, 크러치 브레이크 등이 정지해 있는 상태에서 부하를 유지 할 때의 토크이다.
⑤ 허용 토크 : 모터를 운전할 때 사용 가능한 최대 토크를 말하며, 모터의 정격 토크, 온도상승, 조립된 기어 헤드 강도에 따라 결정된다.
![]()
기계적인 볼트는 자동차.기계.항공.선박.철도. 자동화등 산업 전반에서 필요한 중요한 구성부품이며 부적합한 사용이나 잘못된 공정은 조립된 품질의 결함이나 안전에 위험한 요소이다. 볼트의 올바른 체결을 위하여 여러가지 방법이 제안된다. 즉 볼트의 기계적인 특성을 이용하거나 체결시 부수적인 수단을 이용하는 것이 좋다.
- 토크 제어 체결( Torque control tightening )
- 각도제어 체결 ( Angle control tightening )
- 굽힘제어 체결(Yield control tightening )
- 볼트 폄 체결 ( Bolt stretch tightening )
- 열 체결 ( Heat tightening )
- 장력 체결 ( Tension indicating tightening )
이러한 여러가지 변수를 계산하기 위하여 공학도나 엔지니어를 위하여 토크나 볼트의 인장강도. 기타 변수를 계산.응용토록 소프트웨어의 활용이 늘고 있다.